Downloads
DOI:
https://doi.org/10.7480/spool.2021.2.6075Published
Issue
Section
Categories
License
Copyright (c) 2021 Henriette Bier, Edwin Vermeer, Arwin Hidding, Krishna Jani

This work is licensed under a Creative Commons Attribution 4.0 International License.

How to Cite
Keywords:
Data-driven design, robotic production and operation, habitat, renewable energy, autarkic systemAbstract
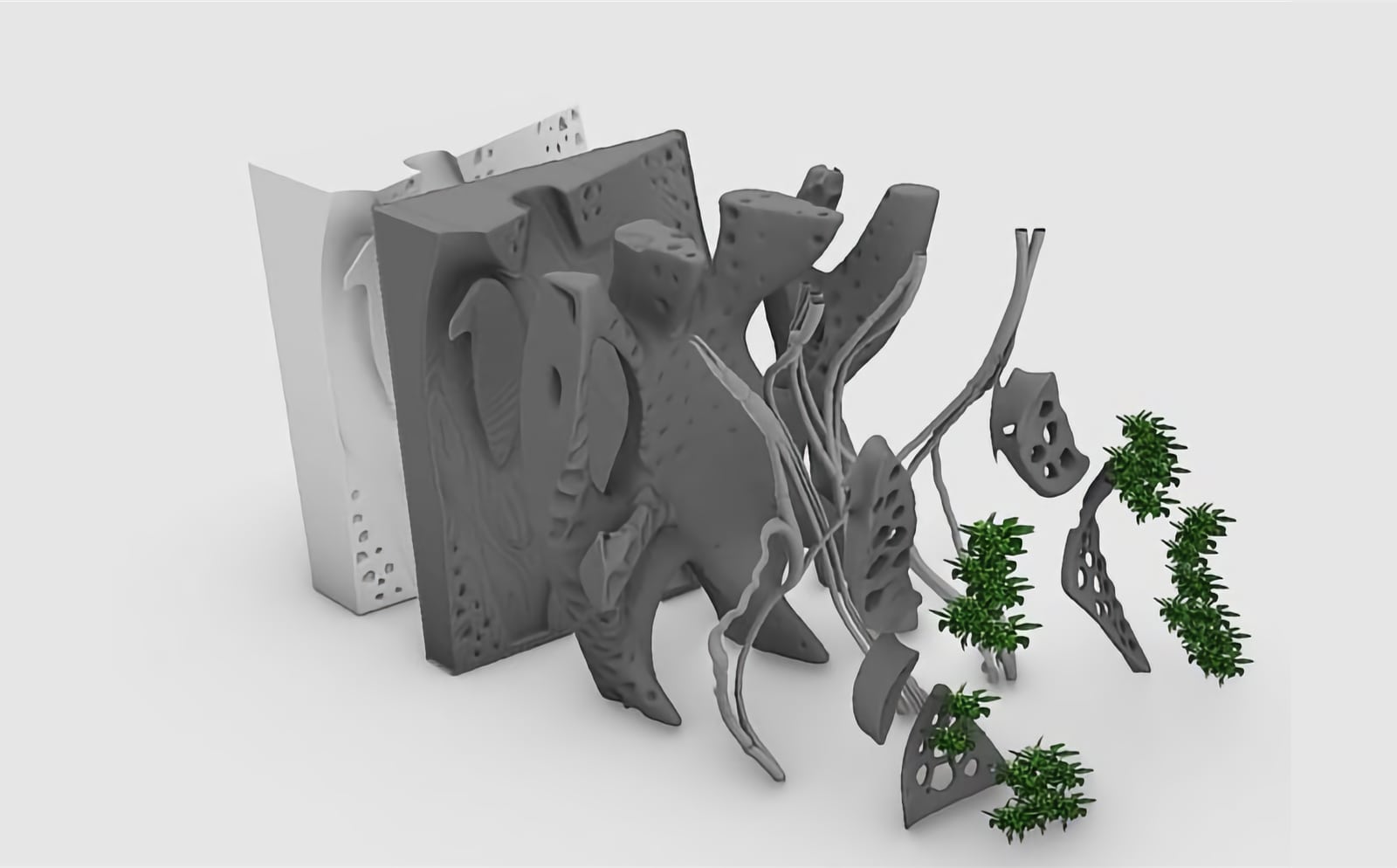
In order for off-Earth top surface structures built from regolith to protect astronauts from radiation, they need to be several meters thick. Technical University Delft (TUD) proposes to excavate into the ground to create subsurface habitats. By excavating, not only can natural protection from radiation be achieved but also thermal insulation, as the temperature is more stable underground. At the same time, valuable resources can be excavated via in-situ resource utilization (ISRU). In this process, a swarm of autonomous mobile robots excavate the ground in a downwards sloping spiral movement. The excavated regolith will be mixed with cement, which can be produced on Mars through ISRU, in order to create concrete. The concrete is then 3D printed/sprayed onto the excavated tunnel to reinforce it. As soon as the tunnels are reinforced, the material between the tunnels can be removed in order to create a larger cavity that can be used for habitation. The proposed approach relies on design-to-robotic-production (D2RP) technology developed at TUD for on-Earth applications. The rhizomatic 3D-printed structure is a structurally optimized, porous shell structure with increased insulation properties. In order to regulate the indoor pressurised environment, an inflatable structure is placed inside the 3D-printed cavity. This inflatable structure is made of materials that can at some point also be produced on Mars via ISRU. Depending on location, the habitat and the production system are powered by a system combining solar and kite-power. The ultimate goal is to develop an autarkic D2RP system for building subsurface autarkic habitats on Mars from locally-obtained materials.
Downloads
References
Bier, H., Liu Cheng, A., Mostafavi, S., Anton, A., & Bodea, S. (2018). Robotic Building as Integration of Design-to-Robotic-Production and -Operation. In H. Bier (Ed.), Robotic Building (pp. 97–120). Springer International Publishing. https://doi.org/10.1007/978-3-319-70866-9_5
Happel, J. A. (1993). Indigenous Materials for Lunar Construction. Applied Mechanics Reviews, 46(6), 313–325. https://doi.org/10.1115/1.3120360
Khoshnevis, B., Yuan, X., Zahiri, B., Zhang, J., & Xia, B. (2016). Construction by Contour Crafting using sulfur concrete with planetary applications. Rapid Prototyping Journal, 22(5), 848–856. https://doi.org/10.1108/RPJ-11-2015-0165
Kootstra, G., Bender, A., Perez, T., & van Henten, E. J. (2020). Robotics in Agriculture. In M. H. Ang, O. Khatib, & B. Siciliano (Eds.), Encyclopedia of Robotics (pp. 1–19). Springer Berlin Heidelberg. https://doi.org/10.1007/978-3-642-41610-1_43-1
Santovincenzo, A. (2004). CDF Study Report Human Missions to Mars Overall Architecture Assessment [ESA Technical Report CDF-20(A),]. http://emits.sso.esa.int/emits-doc/1-5200-RD20-HMM_Technical_Report_Final_Version.pdf
Spiero, F., & Dunand, D. (1997). Simulation of Martian Materials and Resources Exploitation on a Variable Gravity Research Facility. In T. Meyer (Ed.), The Case for Mars IV: The International Exploration of Mars—Consideration for Sending Humans, Proceedings of the fourth Case for Mars Conference, Univelt for the American Astronautical Society (p. 356).
Wamelink, G. W. W., Frissel, J. Y., Krijnen, W. H. J., Verwoert, M. R., & Goedhart, P. W. (2014). Can Plants Grow on Mars and the Moon: A Growth Experiment on Mars and Moon Soil Simulants. PLoS ONE, 9(8), e103138. https://doi.org/10.1371/journal.pone.0103138
Wan, L., Wendner, R., & Cusatis, G. (2016). A novel material for in situ construction on Mars: Experiments and numerical simulations. Construction and Building Materials, 120, 222–231. https://doi.org/10.1016/j.conbuildmat.2016.05.046
