Action Packages, Robot Motion and Human-Robot Collaboration in Domestic Environments
Downloads
DOI:
https://doi.org/10.47982/spool.2024.1.03Published
Issue
Section
Categories


How to Cite
Keywords:
human-robot teaming, human-robot collaboration, robot programming, task allocation, Therbligs, kitchen, workshopAbstract
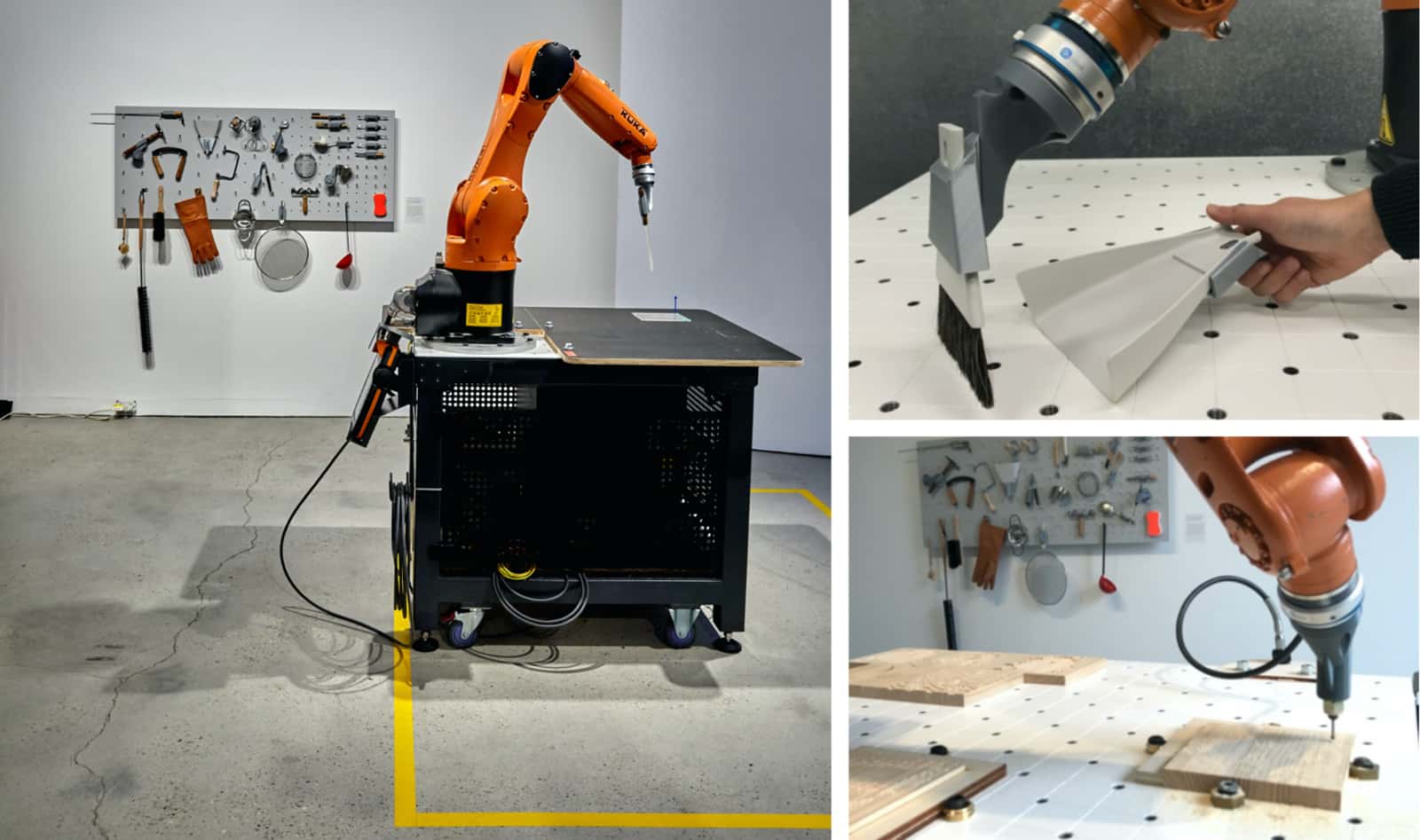
Industrial robotic arms commonly require specialist knowledge for machine functions. Specifically, training cobots for work sequences is time consuming and complex when task complexity increases, such as through differentiation in tool adaptations or work processes. This research explores robot versatility for a context of domestic environments (such as a kitchen/workshop), where work processes are approached as a hybrid scenario, with setup for integration of a tool variety whereby human-robot teams collaborate. The paper discusses a) novel workflows based on a palette of work tools adopted for robot tooling to translate manual human tasks to human-robot tasks; b) an initial script series for work processes that represents modelling, planning, simulation, and implementation; c) a framework for task division through action sets based on Therbligs that supports users; and d) an empirical evaluation of the approach through a series of user studies. In a post-carbon context, previously autonomous robots are required to become more versatile in terms of productivity, scalability, safety and skill criteria and environmental impact. This research extends beyond traditional kitchens to include workshop and fabrication scenarios characterised by the complexity and variability of task applications, guided by detailed action packages that explore robotic work for modular components or fluid and liquid materials; heat and assembly-based processing; and bridges from food preparation to fabrication and manufacturing tasks.
Downloads
References
Arras, K. O., & Cerqui, D. (2005). Do we want to share our lives and bodies with robots? A 2000 people survey: A 2000-people survey (S. 41 p.) [Application/pdf]. [object Object]. https://doi.org/10.3929/ETHZ-A-010113633
Bollini, M., Tellex, S., Thompson, T., Roy, N., & Rus, D. (2013). Interpreting and Executing Recipes with a Cooking Robot. In J. P. Desai, G. Dudek, O. Khatib, & V. Kumar (Hrsg.), Experimental Robotics (Bd. 88, S. 481–495). Springer International Publishing. https://doi.org/10.1007/978-3-319-00065-7_33 DOI: https://doi.org/10.1007/978-3-319-00065-7_33
Boyer, K. (2004). The robot in the kitchen: The cultural politics of care-work and the development of in-home assistive technology. Middle States Geographer, 37, 72–79.
Cha, E., Forlizzi, J., & Srinivasa, S. S. (2015). Robots in the Home: Qualitative and Quantitative Insights into Kitchen Organization. Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction, 319–326. https://doi.org/10.1145/2696454.2696465 DOI: https://doi.org/10.1145/2696454.2696465
Chen, M., He, C., Wang, M., Yin, Q., & Wang, Y. (2021). Function Layout of Adaptive Aging Population Kitchen Design Based on Trace Observation. In F. Rebelo (Hrsg.), Advances in Ergonomics in Design (Bd. 261, S. 564–570). Springer International Publishing. https://doi.org/10.1007/978-3-030-79760-7_67 DOI: https://doi.org/10.1007/978-3-030-79760-7_67
Colgate, J. E., Wannasuphoprasit, W., & Peshkin, M. A. (1996). Cobots: Robots for Collaboration with Human Operators. In Proceedings of the International Mechanical Engineering Congress and Exhibition, Atlanta. DOI: https://doi.org/10.1115/IMECE1996-0367
De Winter, J., De Beir, A., El Makrini, I., Van De Perre, G., Nowé, A., & Vanderborght, B. (2019). Accelerating Interactive Reinforcement Learning by Human Advice for an Assembly Task by a Cobot. Robotics, 8(4), 104. https://doi.org/10.3390/robotics8040104 DOI: https://doi.org/10.3390/robotics8040104
Dessalene, E., Maynord, M., Fermuller, C., & Aloimonos, Y. (2023). Therbligs in Action: Video Understanding through Motion Primitives. https://doi.org/10.48550/ARXIV.2304.03631 DOI: https://doi.org/10.1109/CVPR52729.2023.01023
El Zaatari, S., Marei, M., Li, W., & Usman, Z. (2019). Cobot programming for collaborative industrial tasks: An overview. Robotics and Autonomous Systems, 116, 162–180. https://doi.org/10.1016/j.robot.2019.03.003 DOI: https://doi.org/10.1016/j.robot.2019.03.003
Elbrechter, C., Maycock, J., Haschke, R., & Ritter, H. (2015). Discriminating liquids using a robotic kitchen assistant. 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 703–708. https://doi.org/10.1109/IROS.2015.7353449 DOI: https://doi.org/10.1109/IROS.2015.7353449
Ferguson, D. (2000). Therbligs: The Keys to Simplifying Work. The Gilbreth Network. gilbrethnetwork.tripod.com. https://gilbrethnetwork.tripod.com/therbligs.html
Gajšek, B., Stradovnik, S., & Hace, A. (2020). Sustainable Move towards Flexible, Robotic, Human-Involving Workplace. Sustainability, 12(16), 6590. https://doi.org/10.3390/su12166590 DOI: https://doi.org/10.3390/su12166590
Gilbreth, L. (1930). Efficiency Methods Applied to Kitchen Design. 67(3), 291.
Hansman, H. (2015). This Robot Will Make You Dinner. Smithsonian Magazine. https://www.smithsonianmag.com/innovation/robot-make-me-dinner-180957535/
Hjorth, S., & Chrysostomou, D. (2022). Human–robot collaboration in industrial environments: A literature review on non-destructive disassembly. Robotics and Computer-Integrated Manufacturing, 73, 102208. https://doi.org/10.1016/j.rcim.2021.102208 DOI: https://doi.org/10.1016/j.rcim.2021.102208
Inagawa, M., Takei, T., & Imanishi, E. (2021). Analysis of cooking recipes written in Japanese and motion planning for cooking robot. ROBOMECH Journal, 8(1), 17. https://doi.org/10.1186/s40648-021-00204-6 DOI: https://doi.org/10.1186/s40648-021-00204-6
Ito, H., & Nakamura, S. (2022). Rapid prototyping for series of tasks in atypical environment: Robotic system with reliable program-based and flexible learning-based approaches. ROBOMECH Journal, 9(1), 7. https://doi.org/10.1186/s40648-022-00222-y DOI: https://doi.org/10.1186/s40648-022-00222-y
Javaid, M., Haleem, A., Singh, R. P., & Suman, R. (2021). Substantial capabilities of robotics in enhancing industry 4.0 implementation. Cognitive Robotics, 1, 58–75. https://doi.org/10.1016/j.cogr.2021.06.001 DOI: https://doi.org/10.1016/j.cogr.2021.06.001
Junge, K., Hughes, J., Thuruthel, T. G., & Iida, F. (2020). Improving Robotic Cooking Using Batch Bayesian Optimization. IEEE Robotics and Automation Letters, 5(2), 760–765. https://doi.org/10.1109/LRA.2020.2965418 DOI: https://doi.org/10.1109/LRA.2020.2965418
Leusmann, J., Oechsner, C., Prinz, J., Welsch, R., & Mayer, S. (2023). A Database for Kitchen Objects: Investigating Danger Perception in the Context of Human-Robot Interaction. Extended Abstracts of the 2023 CHI Conference on Human Factors in Computing Systems, 1–9. https://doi.org/10.1145/3544549.3585884 DOI: https://doi.org/10.1145/3544549.3585884
Lin, H.-I., Chen, W.-K., Huang, C. N., & Wang, H. W. (2013). Semantic recognition of human gestures based on spatial and temporal reasoning. 2013 13th International Conference on Control, Automation and Systems (ICCAS 2013), 946–950. https://doi.org/10.1109/ICCAS.2013.6704051 DOI: https://doi.org/10.1109/ICCAS.2013.6704051
Melenbrink, N., Werfel, J., & Menges, A. (2020). On-site autonomous construction robots: Towards unsupervised building. Automation in Construction, 119, 103312. https://doi.org/10.1016/j.autcon.2020.103312 DOI: https://doi.org/10.1016/j.autcon.2020.103312
Michaelis, J. E., Siebert-Evenstone, A., Shaffer, D. W., & Mutlu, B. (2020). Collaborative or Simply Uncaged? Understanding Human-Cobot Interactions in Automation. Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, 1–12. https://doi.org/10.1145/3313831.3376547 DOI: https://doi.org/10.1145/3313831.3376547
Morishita, H., Watanabe, K., Kuroiwa, T., Mori, T., & Sato, T. (2003). Development of robotic kitchen counter: Kitchen counter equipped with sensors and actuator for action-adapted and personally fit assistance. Proceedings 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453), 2, 1839–1844. https://doi.org/10.1109/IROS.2003.1248911 DOI: https://doi.org/10.1109/IROS.2003.1248911
Oyekan, J., Hutabarat, W., Turner, C., Arnoult, C., & Tiwari, A. (2020). Using Therbligs to embed intelligence in workpieces for digital assistive assembly. Journal of Ambient Intelligence and Humanized Computing, 11(6), 2489–2503. https://doi.org/10.1007/s12652-019-01294-2 DOI: https://doi.org/10.1007/s12652-019-01294-2
Pham, T. X. N., Hayashi, K., Becker-Asano, C., Lacher, S., & Mizuuchi, I. (2017). Evaluating the usability and users’ acceptance of a kitchen assistant robot in household environment. 2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 987–992. https://doi.org/10.1109/ROMAN.2017.8172423 DOI: https://doi.org/10.1109/ROMAN.2017.8172423
Rusu, R. B., Gerkey, B., & Beetz, M. (2008). Robots in the kitchen: Exploiting ubiquitous sensing and actuation. Robotics and Autonomous Systems, 56(10), 844–856. https://doi.org/10.1016/j.robot.2008.06.010 DOI: https://doi.org/10.1016/j.robot.2008.06.010
Schoen, A., Henrichs, C., Strohkirch, M., & Mutlu, B. (2020). Authr: A Task Authoring Environment for Human-Robot Teams. Proceedings of the 33rd Annual ACM Symposium on User Interface Software and Technology, 1194–1208. https://doi.org/10.1145/3379337.3415872 DOI: https://doi.org/10.1145/3379337.3415872
Techable. (2019). Unveiling of a cooking assistant at KBIS 2019. techtable.jp. https://techable.jp/archives/94801
Wang, X., Lee, K., Hakhamaneshi, K., Abbeel, P., & Laskin, M. (2021). Skill Preferences: Learning to Extract and Execute Robotic Skills from Human Feedback. https://doi.org/10.48550/ARXIV.2108.05382
Yamazaki, K., Watanabe, Y., Nagahama, K., Okada, K., & Inaba, M. (2010). Recognition and manipulation integration for a daily assistive robot working on kitchen environments. 2010 IEEE International Conference on Robotics and Biomimetics, 196–201. https://doi.org/10.1109/ROBIO.2010.5723326 DOI: https://doi.org/10.1109/ROBIO.2010.5723326
Yen, Y. R. (2011). A study of developing the procedural logic learning system using the concept of Therbligs. 2011 IEEE International Conference on Multimedia and Expo, 1–6. https://doi.org/10.1109/ICME.2011.6012140 DOI: https://doi.org/10.1109/ICME.2011.6012140
