Downloads
DOI:
https://doi.org/10.47982/spool.2024.1.05Published
Issue
Section
Categories


How to Cite
Keywords:
pop-up architecture, computational design, robotic production,, assembly and operation, in-situ and prefab 3D printing, human-robot interactionAbstract
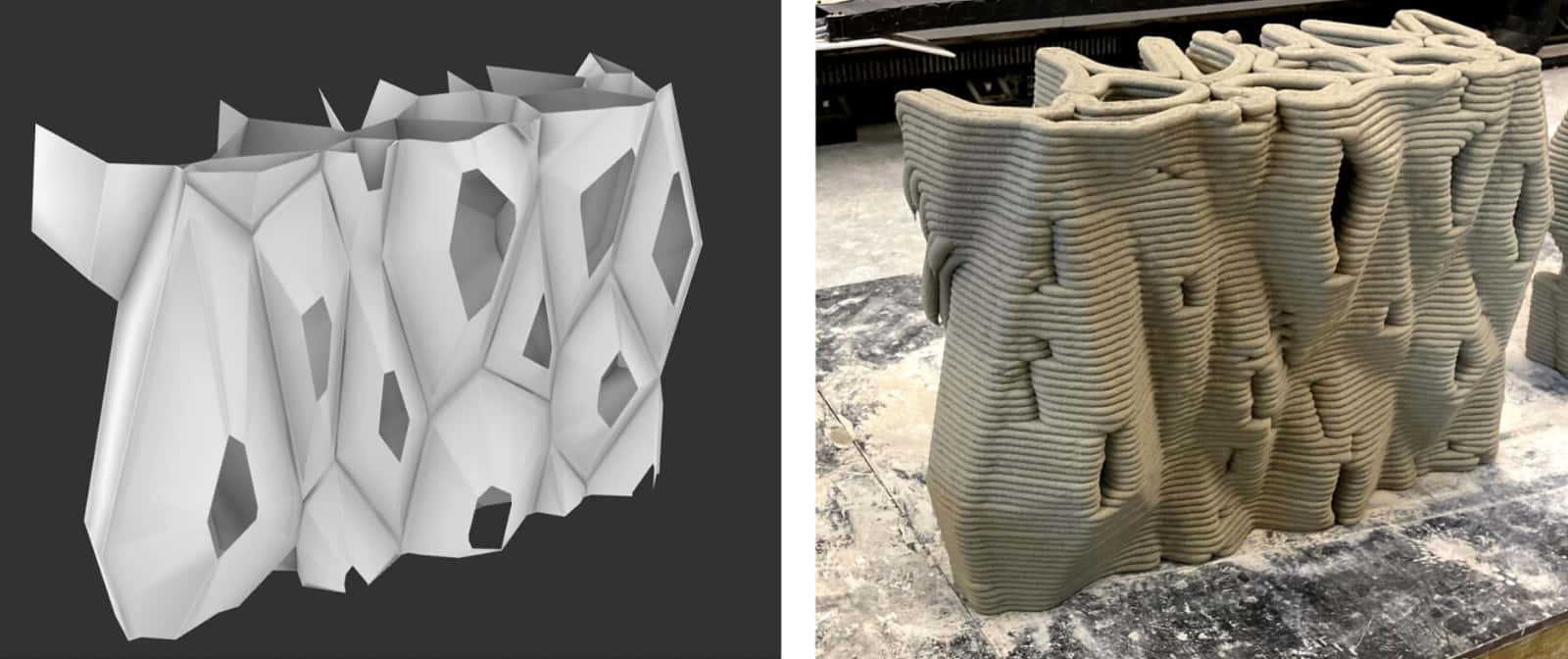
This paper revisits existing pop-up typologies in architecture to identify opportunities for new shelter models to address current housing demands and future habitation requirements on Mars. It presents advancements in design to production methodologies based on computational and robotic techniques to meet current requirements and affordances while integrating sustainable and adaptive functionalities. The main goal is to advance pop-up architecture by developing methods and technologies for rapidly deployable on- and off-Earth habitats while addressing challenges of carbon-free architecture by means of 3D printing. By reviewing state-of-the-art in-situ vs. prefab 3D printing approaches with a particular focus on Human-Robot Interaction (HRI) supported Design-to-Robotic-Production-Assembly and -Operation (D2RPA&O) methods developed at TU Delft material, process, and energy efficiency using locally sourced materials is achieved.
Downloads
References
Anton, A., Reiter, L., Wangler, T., Frangez, V., Flatt, R. J., & Dillenburger, B. (2021). A 3D concrete printing prefabrication platform for bespoke columns. Automation in Construction, 122, 103467. https://doi.org/10.1016/j.autcon.2020.103467 DOI: https://doi.org/10.1016/j.autcon.2020.103467
Archigram.net. (1964). Portfolio. http://archigram.net/portfolio.html
Bard, J., Cupkova, D., Washburn, N., & Zeglin, G. (2018). Robotic concrete surface finishing: A moldless approach to creating thermally tuned surface geometry for architectural building components using Profile-3D-Printing. Construction Robotics, 2(1–4), 53–65. https://doi.org/10.1007/s41693-018-0014-x DOI: https://doi.org/10.1007/s41693-018-0014-x
Bell, J. (2018). Own a Pioneering Prefabricated House Designed by Architect Jean Prouvé. Sothebys.Com. https://www.sothebys.com/en/articles/own-a-pioneering-prefabricated-house-designed-by-architect-jean-prouve
Bertino, G., Fischer, T., Puhr, G., Langergraber, G., & Österreicher, D. (2019). Framework Conditions and Strategies for Pop-Up Environments in Urban Planning. Sustainability, 11(24), 7204. https://doi.org/10.3390/su11247204 DOI: https://doi.org/10.3390/su11247204
Bier, H., Hidding, A., Calabrese, G., Aslaminezhad, A., Laszlo, V., & Peternel, L. (2023). Rhizome 2.0: Scaling-up Capability of Human-Robot Interaction Supported Approaches for Robotically 3D-printing Extraterrestrial Habitats. Roboticbuilding.Eu. http://cs.roboticbuilding.eu/index.php/Rhizome2
Bier, H., Hidding, A., & Galli, M. (2020, October 14). Design-to-Robotic-Production and -Assembly for Architectural Hybrid Structures. 37th International Symposium on Automation and Robotics in Construction, Kitakyushu, Japan. https://doi.org/10.22260/ISARC2020/0207 DOI: https://doi.org/10.22260/ISARC2020/0207
Bier, H., Khademi, S., Van Engelenburg, C., Prendergast, J. M., & Peternel, L. (2022). Computer Vision and Human–Robot Collaboration Supported Design-to-Robotic-Assembly. Construction Robotics, 6(3–4), 251–257. https://doi.org/10.1007/s41693-022-00084-1 DOI: https://doi.org/10.1007/s41693-022-00084-1
Bier, H., Latour, M., Hidding, A., Veere, F., Peternel, L., Verma, M., Schmehl, R., Ourouvoma, L., & Cervone, A. (2020). Rhizome 1.0: Development of an Autarkic Design-to-Robotic-Production and -Operation System for Building Off-Earth Habitats. Roboticbuilding.Eu. http://cs.roboticbuilding.eu/index.php/2019MSc3
Bier, H., Schmehl, R., Mostafavi, S., Anton, A., & Bodea, S. (2017, July 1). Kite-Powered Design-to-Robotic-Production for Affordable Building on Demand. 34th International Symposium on Automation and Robotics in Construction, Taipei, Taiwan. https://doi.org/10.22260/ISARC2017/0078 DOI: https://doi.org/10.22260/ISARC2017/0078
Burger, J., Aejmelaeus-Lindström, P., Gürel, S., Niketić, F., Lloret-Fritschi, E., Flatt, R. J., Gramazio, F., & Kohler, M. (2023). Eggshell Pavilion: A reinforced concrete structure fabricated using robotically 3D printed formwork. Construction Robotics, 7(2), 213–233. https://doi.org/10.1007/s41693-023-00090-x DOI: https://doi.org/10.1007/s41693-023-00090-x
Davidovits, J. (2013). Geopolymer Cement a review. Geopolymer Science and Technics; Geopolymer Institute Library. https://www.geopolymer.org/wp-content/uploads/GPCement2013.pdf
Doerstelmann, M., Knippers, J., Koslowski, V., Menges, A., Prado, M., Schieber, G., & Vasey, L. (2015). ICD/ITKE Research Pavilion 2014–15: Fibre Placement on a Pneumatic Body Based on a Water Spider Web. Architectural Design, 85(5), 60–65. https://doi.org/10.1002/ad.1955 DOI: https://doi.org/10.1002/ad.1955
Dunn, N. (2012). Digital fabrication in architecture. Laurence King Publishing.
MoMA. (2013). Walking City on the Ocean, project (Exterior perspective). Moma.Org. https://www.moma.org/collection/works/814
Nerella, V. N., & Mechtcherine, V. (2019). Studying the Printability of Fresh Concrete for Formwork-Free Concrete Onsite 3D Printing Technology (CONPrint3D). In 3D Concrete Printing Technology (pp. 333–347). Elsevier. https://doi.org/10.1016/B978-0-12-815481-6.00016-6 DOI: https://doi.org/10.1016/B978-0-12-815481-6.00016-6
Peternel, L., Loopik, H., & Avaei, A. (2021). Documentation of final design of subsurface habitat using swarm robotics and HRI. https://docs.google.com/document/d/1UEIBI8ZtSQBdnVTL1y7bapRwtjLLA4LH/
Peternel, L., Tsagarakis, N., Caldwell, D., & Ajoudani, A. (2018). Robot adaptation to human physical fatigue in human–robot co-manipulation. Autonomous Robots, 42(5), 1011–1021. https://doi.org/10.1007/s10514-017-9678-1 DOI: https://doi.org/10.1007/s10514-017-9678-1
Prouvé, J. (2017). Architect for better days. Phaidon Press Limited ; LUMA Foundation.
Steiner, H. A. (2009). Beyond Archigram: The structure of circulation. Routledge.
Tamke, M., Nicholas, P., & Zwierzycki, M. (2018). Machine learning for architectural design: Practices and infrastructure. International Journal of Architectural Computing, 16(2), 123–143. https://doi.org/10.1177/1478077118778580 DOI: https://doi.org/10.1177/1478077118778580
