Downloads
DOI:
https://doi.org/10.7480/spool.2017.1.1911Published
Issue
Section
Categories
License
Copyright (c) 2020 SPOOL

This work is licensed under a Creative Commons Attribution 4.0 International License.

How to Cite
Keywords:
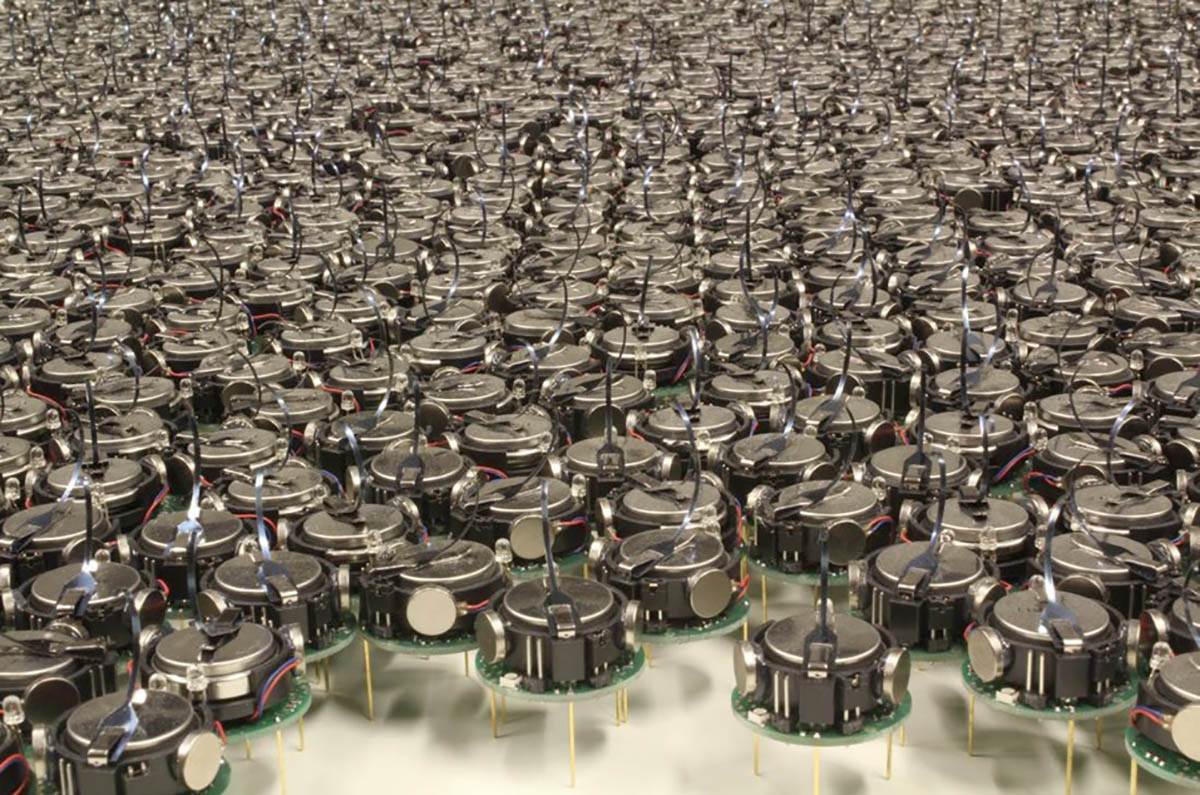
Swarm robotics, self-organization, multi-agent systemsAbstract
Not only recent Science Fiction – e.g., Star Trek Beyond (USA 2016) – celebrates the capacities of robot collectives. Also RoboCup, an annual robot soccer competition, or Harvard University’s Kilobot Project show stunning examples of the central idea behind Swarm Robotics: »[U]sing swarms is the same as getting a bunch of small cheap dumb things to do the same job as an expensive smart thing« (Beni/Wang 1989). This article examines some crucial aspects of the techno-history of a research field which intertwines engineering and biological knowledge and whose applications deal with compelling questions about synchronization and self-organization in changing environments – on the ground, in the air, and under water.
